V2X System


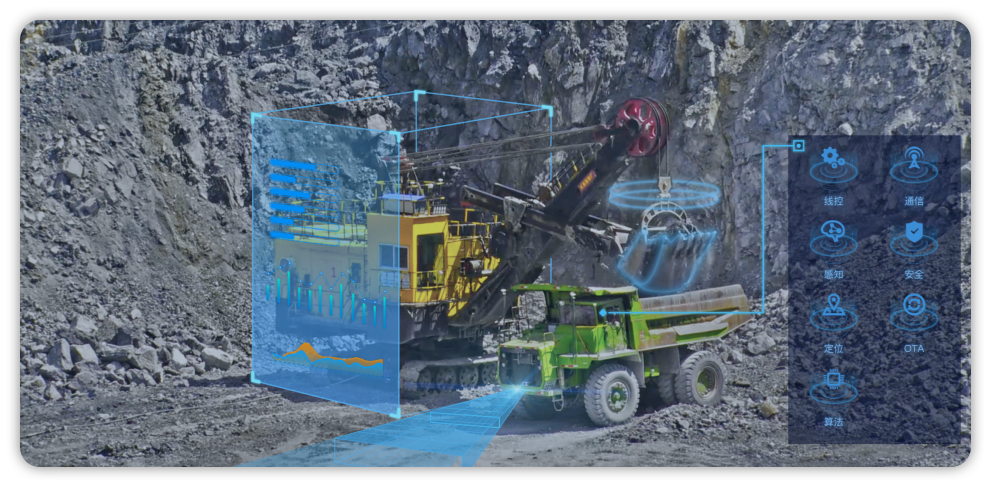

Through the information sharing between trucks and shovels, the control of the operation system is realized. The autonomous driving mining truck equipped with intelligent algorithm can independently find the position of the excavator during the loading process and accept the loading.

By installing road information sensing terminals on both sides of the road to monitor the operation of people, trucks and roads, so as to realize the vehicle command, detection and real-time alarm of illegal vehicles.

By installing a remote intelligent terminal, combining the positioning system, on-board recording and remote data service, the mining truck location, fuel consumption, mileage, and fault status can be monitored in real time.
Address:6th Floor, Building 4, No. 388 Shengrong Road, Zhangjiang Science City, Pudong New Area, Shanghai
Telephone:021-58212107
Post code:200124
Mail:info@boonray.com